
RUKOVANJE RADNIM KOMADIMA NA VIŠEM NIVOU

U modernom proizvodnom pogonu, hvataljke izvode različite zadatke rukovanja. Uz to, različiti radni komadi postavljaju različite zahteve pred tehnologiju hvatanja.
Najnovija generacija hvataljki kompanije SCHUNK ispunjava ove zahteve za fleksibilnošću s režimima hvatanja koji mogu da se prilagođavaju parametrima radnih komada.
U tom cilju stručnjaci za automatizaciju razvili su nove elektronske i softverske platforme koje se kontinuirano razvijaju.
To je izvanredna buduća platforma koju sada predstavlja tehnološki lider iz Laufena: različiti režimi hvatanja za jednu te istu hvataljku za različite zadatke rukovanja.
Korisnici mogu da parametrizuju ove principe hvatanja po želji, u skladu sa specifičnim potrebama.
U srcu režima hvatanja su nova elektronika i softverska platforma koju SCHUNK stalno razvija.
Na osnovu iskustva na terenu, poboljšavaju se postojeći metodi hvatanja i razvijaju nove mogućnosti. Na taj način, stranke koje koriste hvatače trenutne generacije takođe će imati koristi od budućih adaptacija i softverskih nadgradnji.
SCHUNK na taj način optimalno iskorišćava potencijal softvera u automatizaciji komponenti u smislu fleksibilnosti, prilagodljivosti i na kraju održivosti, omogućavajući da njegovi hvatači budu pripremljeni i za budućnost.
DVE NOVE SERIJE HVATAČA SA ZAJEDNIČKOM SOFTVERSKOM PLATFORMOM
SCHUNK je lansirao dve serije hvatača, EGU i EGK, 2022. godine.
Električni univerzalni hvatač EGU je posebno pogodan za fleksibilno umetanje i vađenje mašinskih alata, a važi kao svestrano oruđe za bilo koji zadatak rukovanja.
Hvatač za male komponente EGK je, na drugoj strani, dizajniran za rukovanje delikatnim radnim delovima koji su podložni oštećenjima, a namenjen je zahtevnim i raznovrsnim zadacima u laboratorijskoj industriji ili proizvodnji elektronike.
SCHUNK je zajedno s ove dve serije razvio softversku i elektronsku platformu – oba hvatača dele istu elektroniku i zajednički softver.

Ovde, na primer, korisnik koji upotrebljava oba hvatača ima koristi od doslednog upotrebljavanja i programiranja oba tipa hvatača. Tako štedi vreme, jer operater ne mora više da se bavi kontrolom novog hvatača.
Ovaj ukršteni i funkcionalno ujednačeni koncept pruža strankama značajnu dodatnu vrednost.
SADAŠNJI NAČINI HVATANJA NA DELU: BASICGRIP, SOFTGRIP, STRONGGRIP
S novom softverskom platformom SCHUNK je na početku kreirao tri različita režima hvatanja: BasicGrip, SoftGrip i StrongGrip.
Ovi različiti metodi hvatanja otvaraju novu dimenziju za korisnike za razlikovanje rukovanja različitim delovima prilagođenim aplikaciji.
Prethodno uobičajeni "normalni režim" BasicGrip-a je metod hvatanja s vremenski optimizovanim procesom – to znači da je proces hvatanja što je moguće brži i postiže visok protok.
Ovaj režim je kompatibilan i sa EGU i sa EGK. Motor je trajno pobuđen i hvatanje se trajno prilagođava motoru, što je posebno važno za otkrivanje gubitka radnog komada.
U BasicGrip režimu, radni komad se prihvata s 50 do 100 posto nominalne sile hvatanja. Brzina hvatanja se automatski menja samim hvatačem u zavisnosti od podešene sile hvatanja.
Međutim, tokom procesa hvatanja nastaje impuls sile – iako u opsegu milisekundi; to je nepovoljno za osetljive komponente i može da dovede do oštećenja.

To treba naročito imati u vidu relevantno u industriji elektronike, na primer prilikom rukovanja osetljivim elektronskim komponentama od strane montažne mašine.
Tokom kratkog vrhunca sile koji se javlja prilikom hvatanja, prevelika sila hvatanje deluje na komponentu, što može dovesti do savijanja PCB-ova, nastanka finih pukotina ili čak prekida pojedinačnih provodnih linija.
Slični osetljivi scenariji mogu se zamisliti i na području laboratorija. Ako se upotrebi prevelika sila hvatanja na epruvetu ili neki drugi osetljiv medijum s delikatnim sadržajem tokom vrhunca sile, mogu se javiti pukotine ili čak pucanje s nepredvidljivim posledicama zbog kontaminacije.
Da bi se ove funkcije specifične za aplikaciju uzele u obzir, SCHUNK je izdiferencirao režime hvatanja.
SOFTGRIP REŽIM: KOMPATIBILAN S EGK ZA NEŽNO RUKOVANJE
SoftGrip režim hvatanja je pogodan za rukovanje delikatnim, krhkim radnim komadima koji su podložni lomljenju, kao što su elektronika, staklo ili keramički predmeti.
Zbog u celini niže brzine hvatanja, vrhovi sile su gotovo eliminisani. Stranke mogu unapred da izvrše predpozicioniranje unutar nekoliko desetina milimetara ispred radnog komada maksimalnom brzinom, a zatim pošalju komandu za hvatanje; predpozicioniranjem se kompenzira određeni iznos vremenskog ciklusa i relevantan je za sve principe hvatanja.
Čak i u SoftGrip režimu, hvatanje je trajno podešeno pomoću motora. Metod funkcioniše u nominalnom rasponu sile hvatanja između 50 do 100 posto i dostupan je za EGK hvatač malih komada, koji se koristi u lomljivim scenarijima rukovanja.
RUKOVANJE TEŠKIM DELOVIMA POMOĆU STRONGGRIPA: VIŠE SE DOBIJA NEGO ŠTO SE DAJE
EGU univerzalni hvatač koristi se u industrijskom rukovanju teškim, robusnim i neosetljivim komponentama – na primer u automatizovanom utovaru mašina.
Za to je često potrebna velika snaga. Stručnjak za tehnologiju hvatanja razvio je StrongGrip režim za ove aplikacione scenarije, kod kojih se iz hvatača dobija više snage nego što se vidi na prvi pogled.
Ova posebna funkcija zasniva se na posebnom triku dizajna: DC motor bez četkica, kočnica magnetnog polja, enkoderski sistem na centralnoj glavnoj osovini za detekciju položaja i cilindrični zupčanik u hvataču.
SCHUNK-ovi dizajneri su sada ubacili fleksibilnu čeljusnu spojnicu između gornjeg cilindričnog zupčanika i izlaznog zupčanika.
Ovim elementom se ostvaruju održavanje sile hvatanja i istovremeno StrongGrip funkcija. U procesu hvatanja prvo je motor nakratko izložen prevelikoj struji i radni komad prihvaćen; sila hvatanja se povećava zahvaljujući relativno visokom unosu energije, koja je iznad nominalne sile hvatanja.
Nakon ovog procesa hvatanja, aktivira se kočnica i zamrzava elastična deformacija u elementu čeljusti.
Tada se motor isključi da se ne bi toplotno preopteretio, a istovremeno se visoka snaga hvatanja sačuva u sistemu praktično bez gubitaka.
ELASTOMER ČUVA VISOKU SILU HVATANJA
Zahvaljujući elastomernom modulu, moguće je izvući više snage iz sistema za hvatanje nego što bi bilo moguće u skladu s ocenjenom snagom.
Zbog isključivanja motora, nakon hvatanja nije potrebna spoljna energija, jer je visoka snaga hvatanja efikasna i omogućava rukovanje teškim radnim komadima.
Primena motorne kočnice može da se vremenski planira, ali mora da se desi najkasnije posle dve sekunde, da se motor ne bi toplotno preopteretio.
U StrongGrip režimu može da bude upotrebljena maksimalna sila hvatanja.
Brzina hvatanja ostaje konstantna tokom procesa.
Iako je tačno da kontinuirani rad u StrongGrip režimu može da dovede do većeg habanja mehaničkih komponenti, treba takođe napomenuti da je neophodna pauza između dva ciklusa hvatanja u ovom režimu sile.
Na primer, preporučuje se pauza od deset sekundi za ciklus hvatanja s maksimalnom snagom hvatanja i vremenom od dve sekunde posle hvatanja na ambijentalnoj temperaturi od 25 stepeni Celzijusa.
INOVACIJE 2023: OBJAVLJIVANJE SOFTVERA DONOSI JAČANJE PERFORMANSI
Novi hvatači EGU i EGK lansirani su krajem 2022. godine i već su bili podvrgnuti opsežnim proverama izdržljivosti i dugotrajnim testovima pre nego što su pušteni u prodaju.
Pored toga, SCHUNK je stekao nove uvide iz produženih naknadnih istraživanja u praktičnom kontinuiranom delovanju, pa je tako bio u mogućnosti da još bolje ispita ograničenja sistema.
Tako performanse postojećeg hardvera mogu da se uz pomoć softverskog podešavanja dodatno poboljšaju.
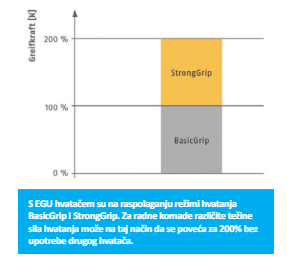
Zahvaljujući softverskim poboljšanjima dostižne snage hvatanja u StrongGrip režimu na EGU mogu da se još više povećaju – s maksimalnih 150 na 200 posto nominalne sile – osim na modelu EGU 70.
S udvostručavanjem sile hvatanja korisnici postižu pravo povećanje performansi.
Na softveru zasnovana upotreba svih potencijala daje korisnicima punu fleksibilnost za različite zadatke rukovanja – s jednim te istim hvatanjem.
"StrongGrip režim može da se prizove u bilo kom trenutku", objašnjava Bendžamin Šel (Benjamin Schell), direktor proizvodnje u SCHUNK-u.
"Korisnik može da precizira da se nakon hvatanja u BasicGrip režimu upotrebi kočnica i prekine se struja motora.
Prednost toga je što je hvatanje sada u nekoj vrsti eko-režima, jer je potrošnja struje znatno smanjena", nastavlja direktor proizvodnje.
Ova posebna karakteristika – visoka snaga hvatanja s motorom bez napajanja – jedinstvena je funkcija i omogućuje operateru postrojenja da primeni proces uštede energije.
SOFTVER PODRŽAVA STRANKE KROZ FLEKSIBILNOST I BUDUĆU SPOSOBNOST
Pored nove fleksibilnosti pridobijene preko režima hvatanja, uobičajeni komunikacioni interfejsi – uključujući PROFINET, EtherNet/IP, EtherCAT i IO-Link, na primer – i konzistentni kontrolni protokol za razmenu podataka dodatni su poeni za korisnika.
"Bez obzira koji interfejs se koristi, operacija je uvek ista", objašnjava dalje Bendžamin Šel".
"Čak i kada upotrebljava drugačiji hvatač, korisnik uvek pronalazi svoj put. U budućnosti će svi mehatronički hvatači iz SCHUNK-a biti bazirani na ovoj novoj softverskoj platformi – što će korisničke sisteme činiti pripremljenim na budućnost, doslednim, održivim i moćnim".
SCHUNK obećava da će se zahtevi stranki i povratne informacije s tržišta biti upotrebljeni za daljni razvoj softverske platforme.
SCHUNK Intec GmbH
Spann- und Greiftechnik
Friedrich-Schunk-Straße 1
A - 4511 Allhaming
Tel. +43-7227-22399-0
Fax +43-7227-21099
info@at.schunk.com
www.schunk.com






























































.gif)





