
Jednostavno uz pomoć AI: Automatski prihvat zahtevnih komponenti
2D Grasping Kit omogućava kompanijama da s lakoćom automatizuju zadatke hvatanja i sortiranja. Za podešavanje, obučavanje i rad nije potrebno stručno osoblje, zahvaljujući oflajn podršci veštačke inteligencije (AI) i jednostavnom korisničkom interfejsu.
Sve proizvodne kompanije se suočavaju sa istim izazovom: Kako da održe ili čak prošire ekonomičnu i efikasnu proizvodnju s istim brojem zaposlenih?
Manjak osoblja postao je pravilo u svim industrijama.
Zato kompanije žele da automatizuju sve više proizvodnih koraka, posebno fizički zahtevnih ili monotonih zadataka za koje je sve teže i teže naći radnike.
Srećom, napredak u robotici, AI i sistemima za hvatanje nastavlja da omogućava nove, ekonomične aplikacije za rešenja automatizacije.
U prošlosti su kompanije obično imale dovoljno kvalifikovanog osoblja za instaliranje i upravljanje sistemima automatizacije.
Kao rezultat toga, sistemi su dobijali sve više funkcija, ali su takođe postajali sve teži za rad.
Danas to predstavlja problem naročito za mala i srednja preduzeća.
Ona se bore s manjkom osoblja, koji ih sprečava da automatizuju svoju proizvodnju i time je pripreme za budućnost.
Posebno se suočavaju s ozbiljnim izazovom kada se radi o rukovanje komponentama uz pomoć robota.
Kada je neophodan sistem kamera da bi se postiglo precizno pozicioniranje za hvatanje komponenti, mnoge kompanije nailaze na ograničenja i moraju se za automatizaciju osloniti na spoljne dobavljače usluga, postajući od njih zavisne.

Lak način da se počne sa automatizacijom
Da bi rešio ovaj problem, SCHUNK je predstavio 2D Grasping Kit, komplet apalikacija koji omogućava brzu, ekonomičnu i jednostavnu automatizaciju zahvaljujući veštačkoj inteligenciji koju je razvio SCHUNK u Nemačkoj.
Komplet se sastoji od kamere s objektivom, industrijskog računara, SCHUNK AI softvera i potrebnih kablova.
Sve komponente su međusobno usklađene i zbog otvorenog TCP/IP interfejsa mogu da se kombinuju s bilo kojim robotom ili čak kontrolerom višeg nivoa (kao što je Siemens PLC). To omogućava rukovanje i sortiranje različitih komponenti nasumično raspoređenih u ravni.
Konačno smo dobili rešenje za niz zadataka koji su bili kompleksni za automatizovanje, a monotoni i neprivlačni za ljudske radnike.
Na primer, kada okrenuti delovi izlaze iz mašine u proizvodnom preduzeću, obično padaju u kutiju.
Radnik ih zatim ručno sortira i stavlja u ležišta u pravilnom položaju tako da sledeći koraci obrade mogu lakše da se automatizuju.
Međutim, u ovom procesu komponente mogu lako da se oštete ili pomešaju. Kada posao preuzme robot, radnik se oslobađa ovih zadataka.
U isto vreme, kompleksnost i podložnost greškama se u narednim automatizovanim procesima smanjuju.
SCHUNK upotrebljava 2D Grasping Kit u svojoj vlastitoj proizvodnji u Nemačkoj.
Kupci imaju priliku da svoje aplikacije provere u CoLab centru za aplikacije robota i lako saznaju kako sistem može da poboljša njihovu vlastitu proizvodnju.

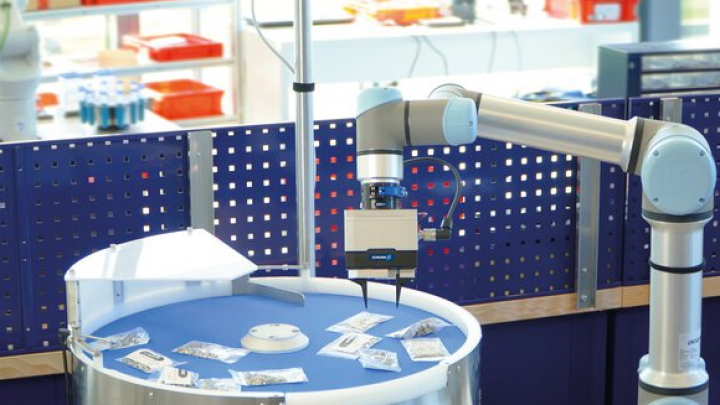
Kompleksan zadatak postaje lak: sortiranje komponenti u providne kese
Ako je sistem mehanički strukturisan, prosečnom korisniku je potrebno samo manje od pola dana da ga nauči o (novim) komponentama.
Veb interfejs softvera vodi korisnika korak po korak do rezultata.
Korak 1 : Fotografisanje komponenti
Kamera gleda odozgo u pokretnu traku, poslužavnik ili sto za razvrstavanje. AI softver prepoznaje i razlikuje komponente na osnovu prethodno naučenih slika i pronalazi optimalne položaje za hvatanje.
Da bi to postigla, kamera prvo snima pozadinu na koju će komponente biti postavljene.
Zatim napravi nekoliko fotografija delova koje treba prihvatiti.
Na primer, ako je zadatak robota da prihvata komponente zajedno sa providnom ambalažom (kao što su vijci i matice u plastičnoj kesi), operator za ispunjenje zadatka jednostavno snimi više fotografija komponenti u raznim položajima.
Osvetljenje je često potcenjen izazov za sisteme automatizacije zasnovane na kameri.
U zavisnosti od mesta ugradnje, izbor odgovarajuće ekspozicije može biti težak, naročito zato što se mora uzeti u obzir više različitih parametara (kao što su veličina, udaljenost, talasna dužina ili ugao snopa). 2D Grasping Kit ne zahteva namenski izvor osvetljenja i zahvaljujući softveru koji pogoni AI znatno je otporniji na ambijentalno svetlo od konvencionalnih vizuelnih sistema.
Kamera je dizajnirana da prihvata različite uslove osvetljenja, uključujući promene dnevnog svetla na osnovu položaja sunca, a takođe je sposobna da se prilagodi različitim pozadinama.
Boja i refleksivnost površine isto tako imaju minimalan uticaj. Sistem pouzdano otkriva metalne komponente čak i na svetlim pozadinama.
Korak 2 : Definisanje objekata i tačaka hvatanja
U sledećem koraku operator jednostavno označava i imenuje komponente.
SCHUNK AI softver automatski izdvaja konturu objekta iz pozadine, izoluje ga i izračunava promenljive elemente za uglove prikaza, uslove osvetljenja i druge parametre.
Nakon svega 10 do 20 slika, softver već ima dovoljan skup podataka o objektima koje treba detektovati.
Korak 3 : Treniraj AI i počni
Pošto prva dva koraka budu završena, AI se u celini obučava oflajn.
Stranka sve vreme zadržava potpunu kontrolu nad podacima, jer oni ostaju sasvim unutar mreže preduzeća.
Trening traje samo jedan do dva sata i 2D Grasping Kit je spreman za rad.
Kamera sada uz pomoć veštačke inteligencije prepoznaje komponente u kesama na osnovu karakterističnih odlika kao što su oblik, veličina i boja.
AI prilagođava i kompenzira sve promene koje mogu da nastanu, kao što su refleksije ili deformacije kesa.
Softver za obradu slika zatim komunicira s robotom i saopštava mu koje komponente prepoznaje, gde su pozicionirane, koliko široko treba da otvori sistem za hvatanje i pod kojim uglom rotacije može najbolje da prihvati komponentu.
Robot zatim pomera svoj hvatač do komponente i prihvati je, postavljajući je u pravilan položaj na unapred definisanom mestu.
Tokom procesa hvatanja i pomeranja, kamera istovremeno detektuje sledeći objekat i izračunava njegovu vrstu i tačku hvatanja.
Postupak traje oko dve sekunde, omogućavajući robotu da prihvati drugi objekt odmah nakon što je spustio prvi.
Ono što ovaj sistem izdvaja od drugih je to što ne samo otkriva objekte nego i automatski izračunava tačke hvatanja za određeni hvatač koji se koristi.
Pored toga, prenosi parametre, kao što su ugao rotacije i širina otvaranja, u sistem kontrole robota. Ako to žele, korisnici mogu veoma lako ručno da memorišu više tačaka hvatanja.
U ovom slučaju, 2D Grasping Kit radi sa univerzalnim hvatačem EGK. Ubuduće će komplet raditi i sa pneumatskim i mehatroničkim paralelnim hvatačima, kao i magnetnim, vakuumskim i adhezivnim hvatačima.
Sažetak
2D Grasping Kit omogućava mnogim kompanijama da lako počnu s automatizacijom:
• Zahvaljujući svom internet interfejsu prilagođenom korisniku, proces učenja može uspešno da se završi u roku od pola dana, čak i od strane neobučenog osoblja,
• Čak i teške komponente (savitljive ili visoko reflektivne) mogu da se obuče veoma lako i pouzdano obavljaju detekciju uz pomoć AI.
• SCHUNK AI softver ne samo da omogućava aplikacije, nego takođe obezbeđuje da je sistem prilagođen korisniku i nesmetano radi u pozadini.
Zahvaljujući ovom softveru, mnogi proizvodni koraci, posebno monotoni zadaci sortiranja na proizvodnim mašinama ili na interfejsu za logistiku (priprema narudžbi) konačno mogu da se pouzdano automatizuju uz minimalni trud.
SCHUNK Intec GmbH
Spann- und Greiftechnik
Friedrich-Schunk-Straße 1
A - 4511 Allhaming
Tel. +43-7227-22399-0
Fax +43-7227-21099
info@at.schunk.com
www.schunk.com






























































.gif)





